
本文将详细介绍JetBot的硬件安装过程,并提供了安装全过程的视频。
由于拍摄过程中主摄像头抽风,视频内容不可用,所以只能用副摄像头的素材,画质有点强差人意,请见谅。
也可参考官Git的安装过程互补长短(本文也有部分图片也来自于这里):
https://github.com/NVIDIA-AI-IOT/jetbot/wiki/hardware-setup
需要准备的工具
M3扳手,M2扳手,M3的六角螺母扳手,十字螺丝刀,一字螺丝刀,绝缘胶带,高温胶带,3M双面胶,电烙铁(有些零件需要焊接加工)。
开始组装
Step – 1 安装无线网卡
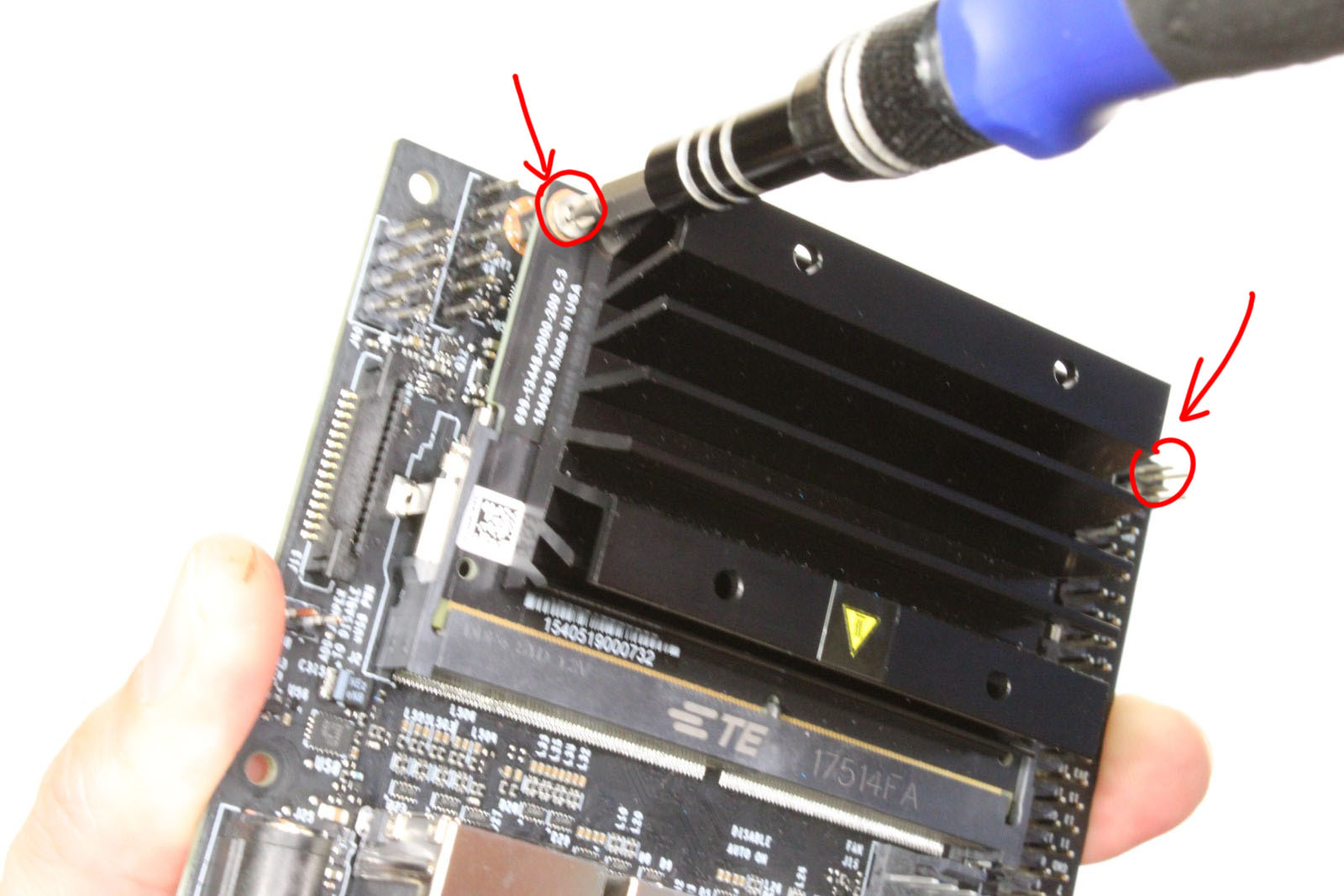
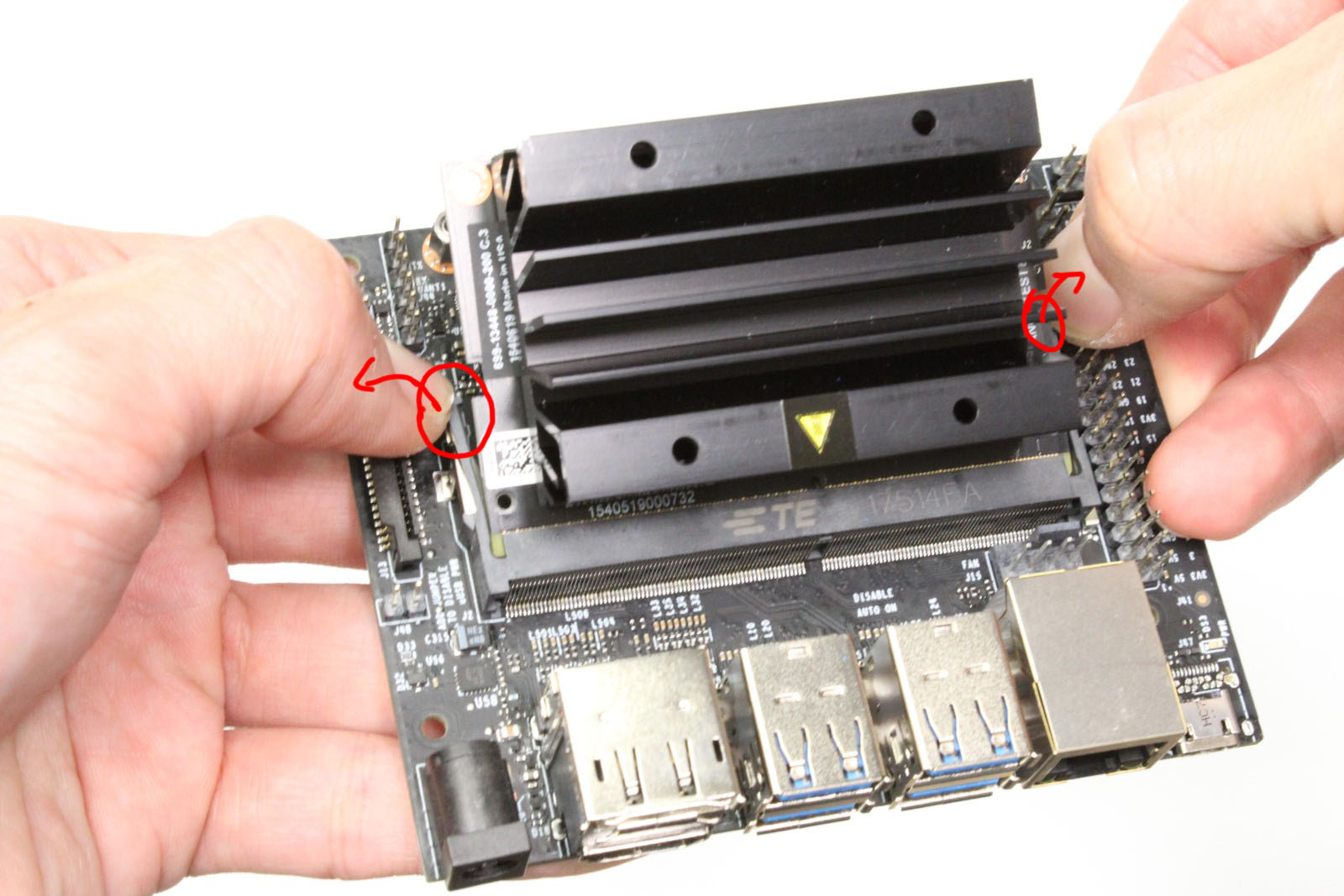
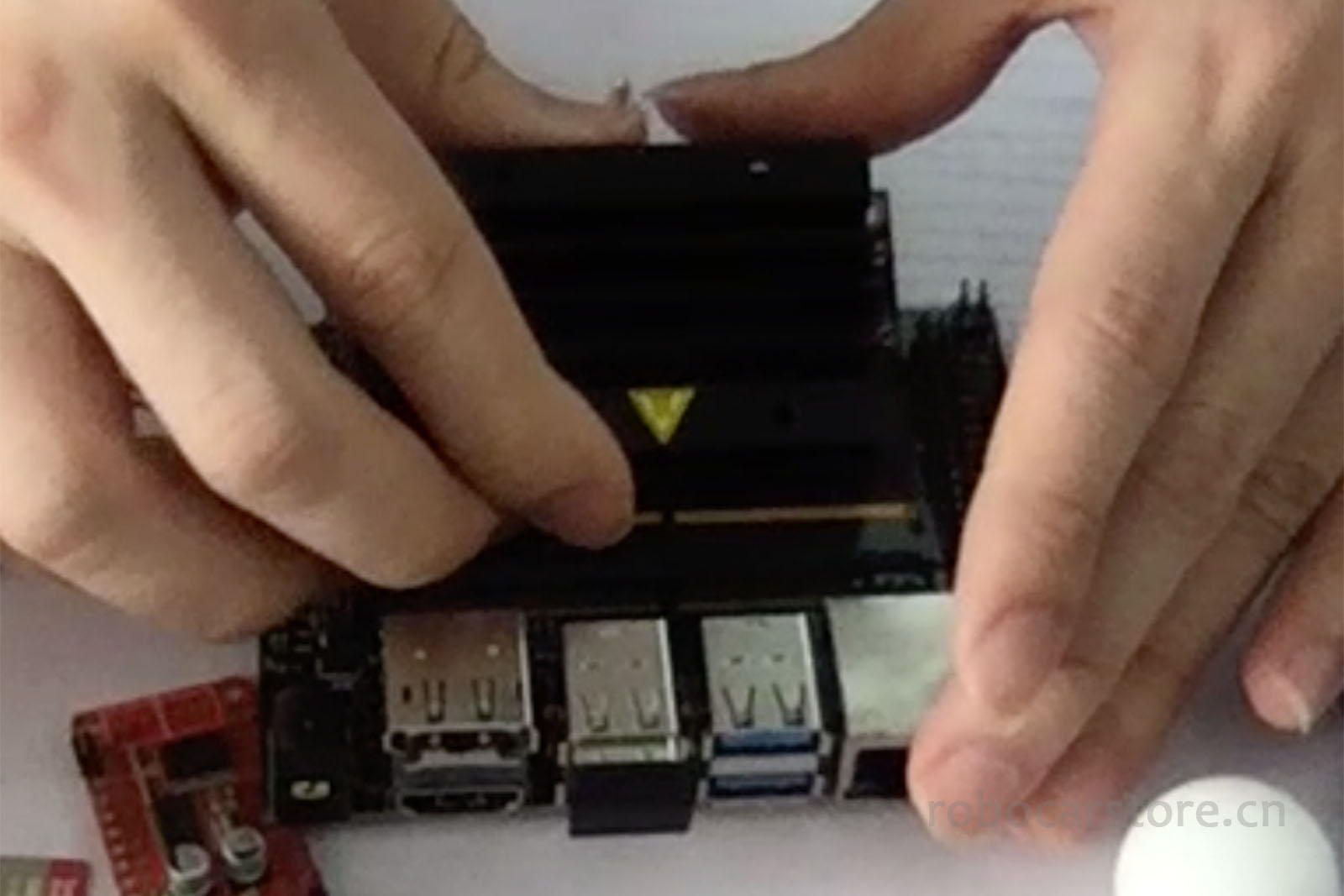
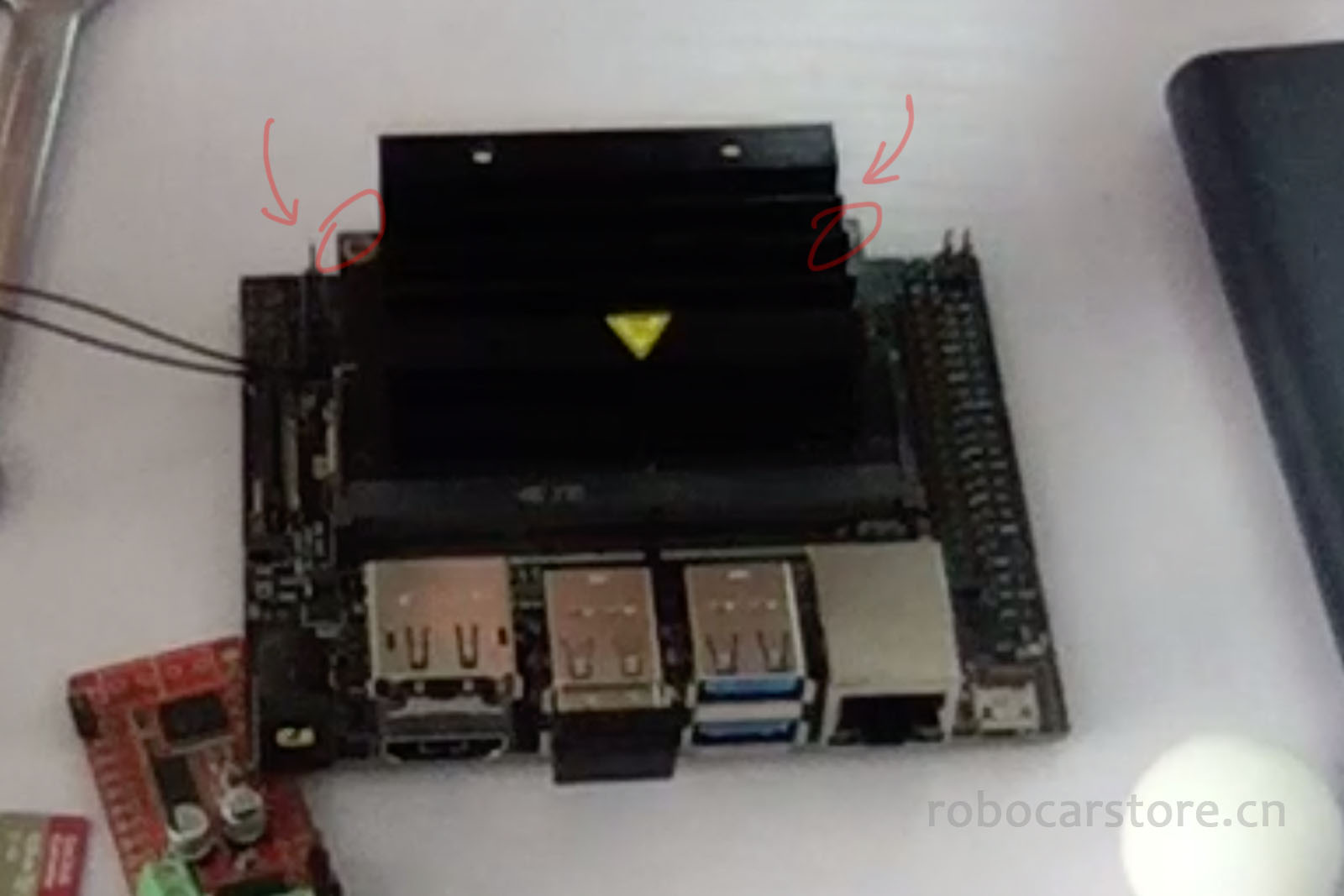
1,从Jetson Nano 上拆除芯片组(带散热片的那整块模组)
先拧开2个螺丝,然后拨开卡扣(侧锁),芯片组即会自动弹起一定角度,顺着这个角度慢慢地把芯片组滑出。

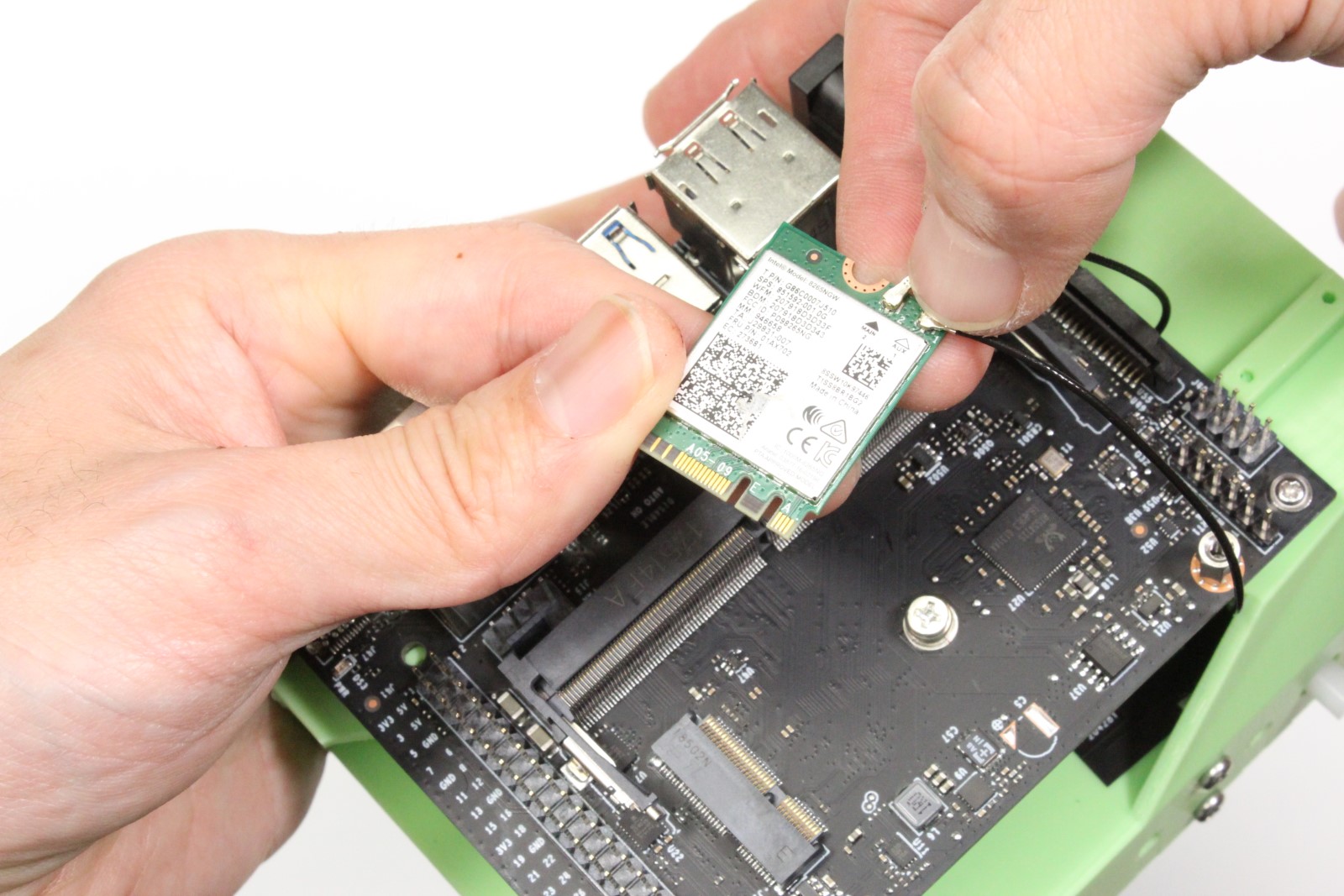
2,安装WiFi模块AC8265
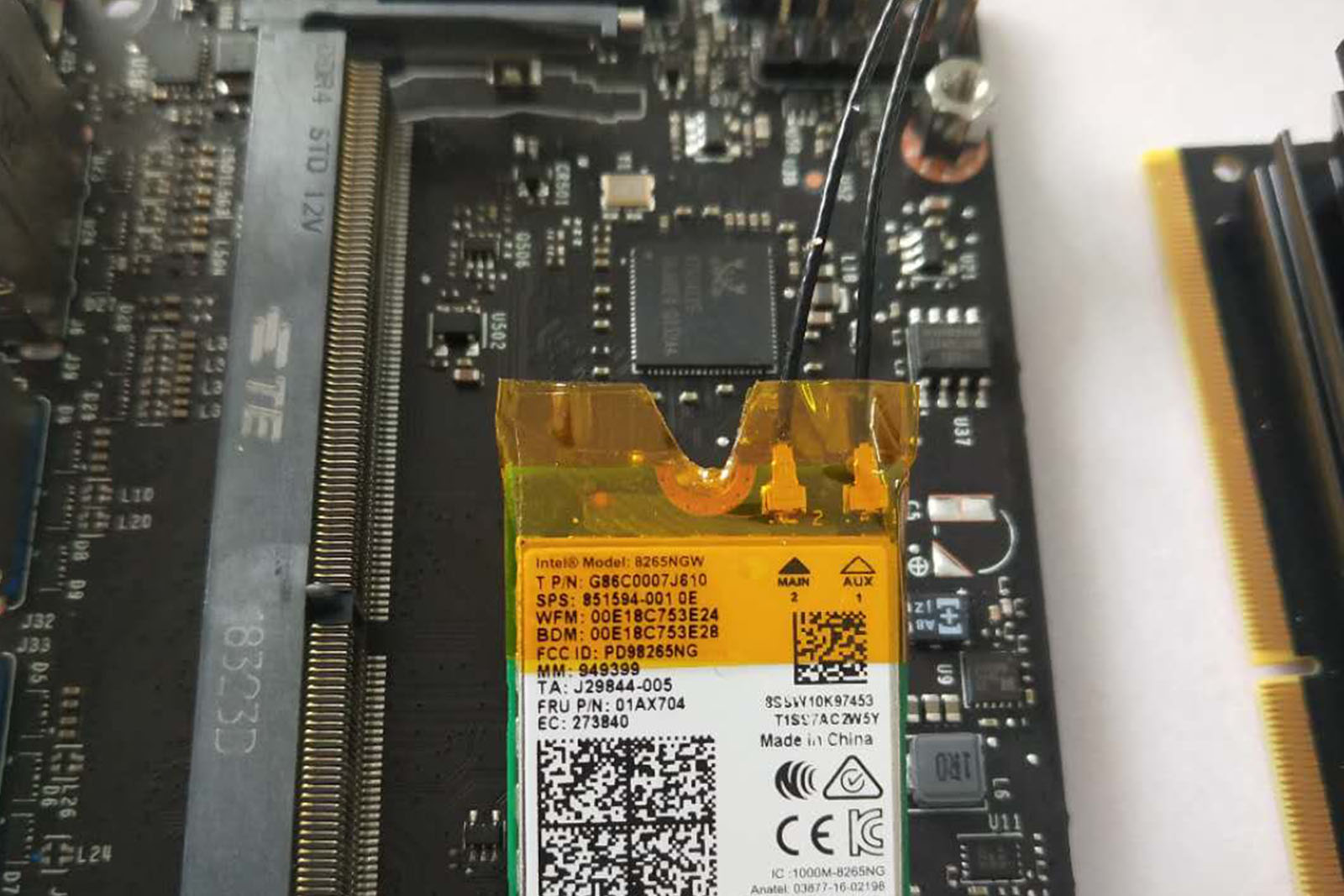
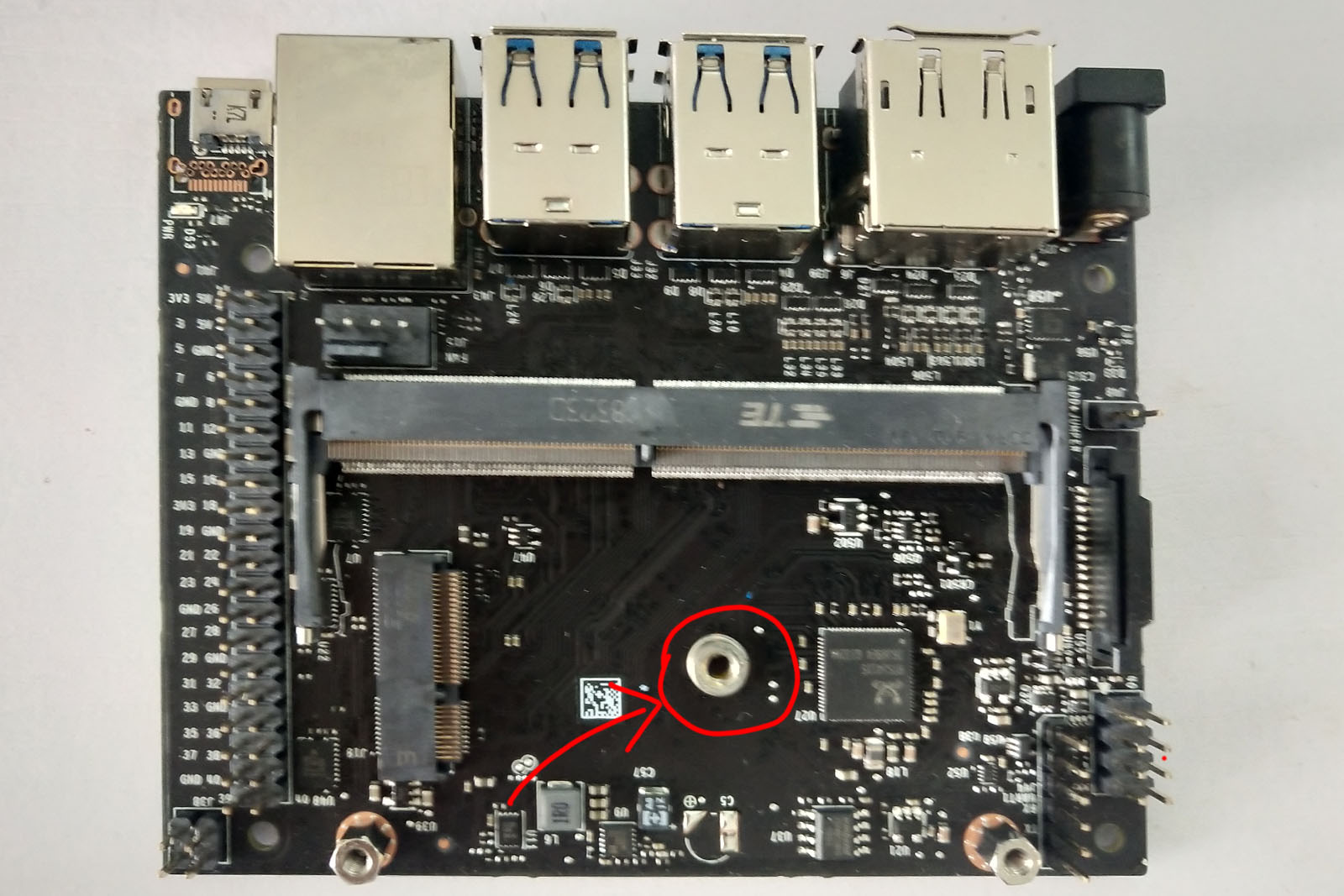
把英特尔无线网卡AC8265接上天线,用高温胶带缠绕加固,避免脱落,并把凹槽的高温带剪掉。把Jetson Nano底座的螺丝拧起,网卡模块插进网卡插槽后,把刚拧起的螺丝拧回去,固定好AC8265网卡模块。
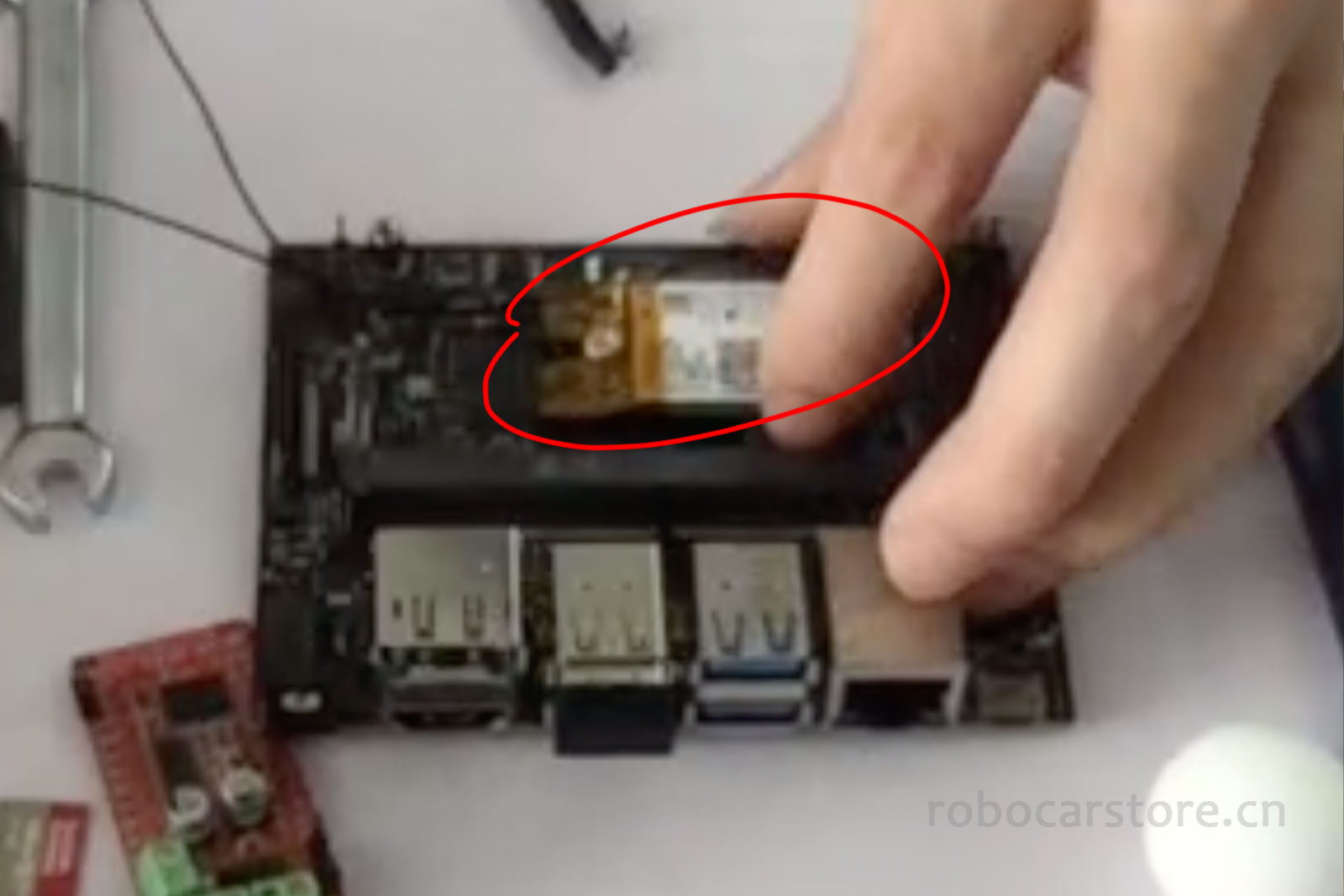
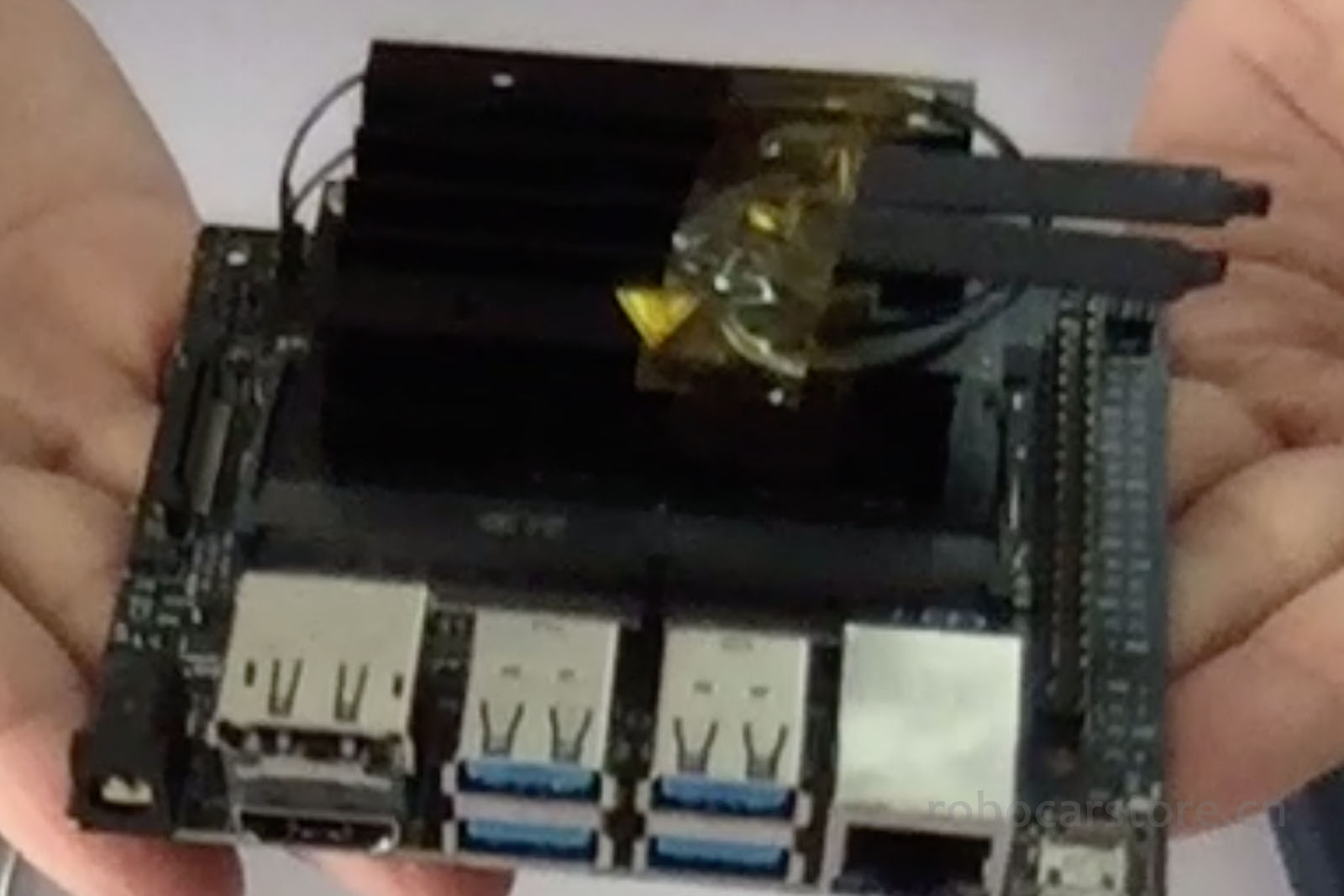
3,芯片组安装回Jetson Nano的底座,并固定好天线
把芯片组插回卡槽,按平,卡扣(侧锁)就回自动卡上去,拧回2个螺丝固定好芯片组,然后用高温带把天线固定在散热片上。
Step – 2 电机驱动接电源线
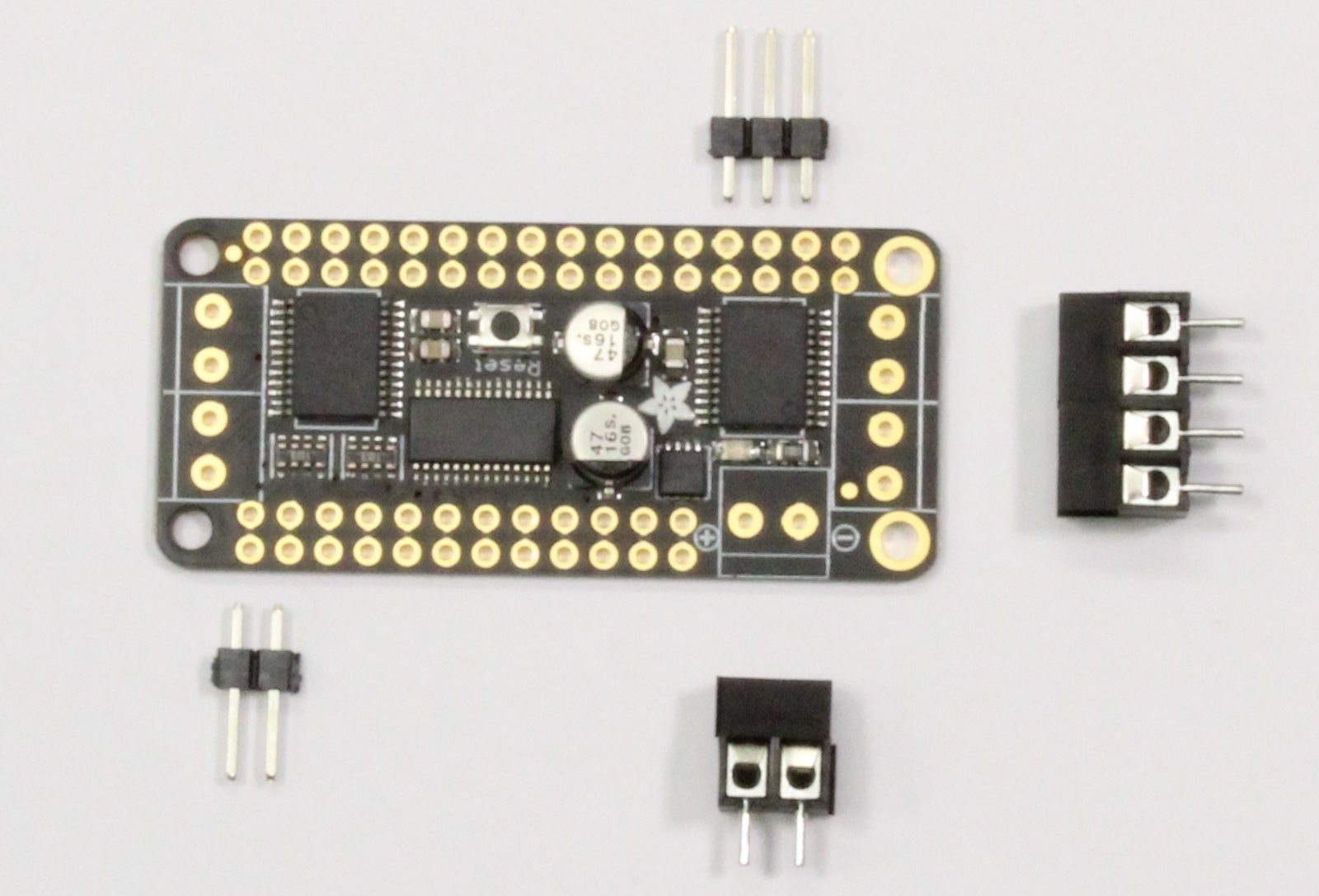
4,焊接电机驱动模块
这里需要焊接,在购买此电机驱动模块时就会有一些配件附送,只需要焊接下图1所示的接口即可,最终加工完成后如图4所示。

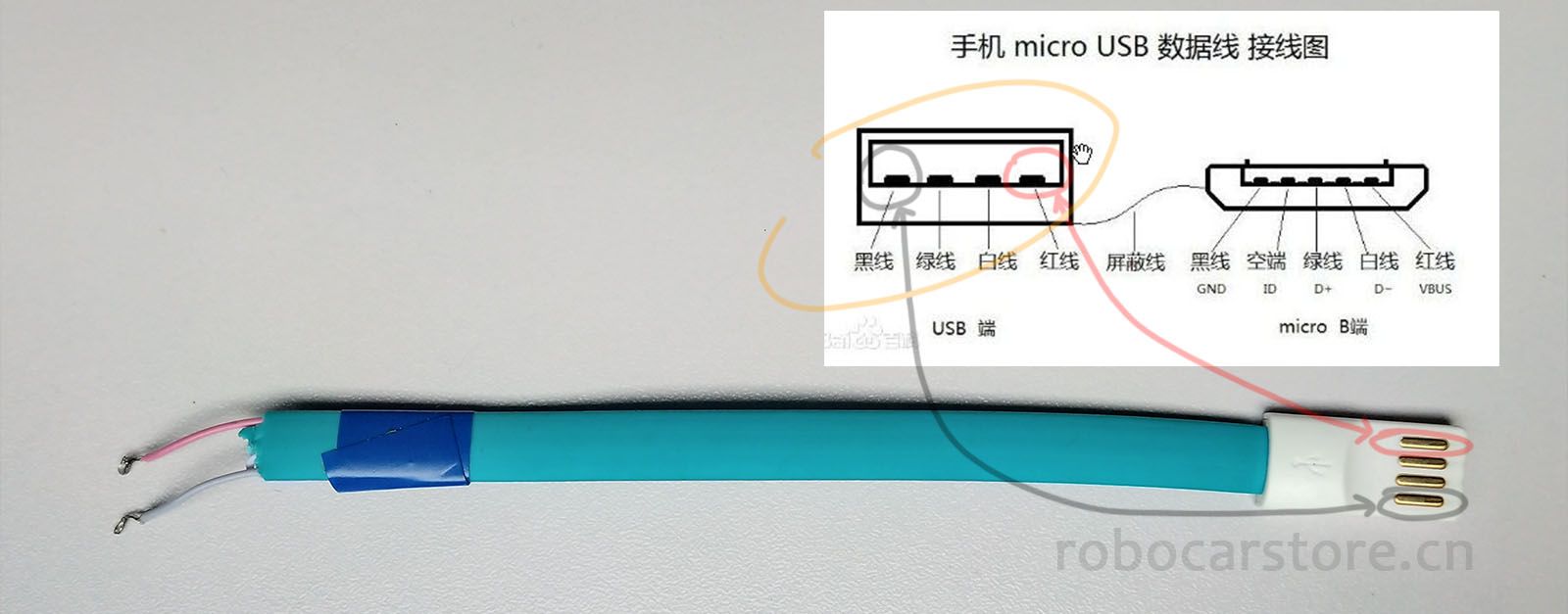
5,MicroUSB电源线剥开正负极
如下图,剥开正负极的电线,其他线用绝缘胶带固定好防止短路即可。一般情况是红正黑负,如果不确定,请参考下图中的MicroUSB数据线接线图,用万用表测量。也可以接上一个LED灯,利用二极管的特性,通电来测试正负极是否正确。
注意:这个正负极一定要搞清楚,搞错了轻则有可能会烧掉你的Jetson Nona,更严重则可能会导致电源爆炸。
一定要搞清楚!
一定要搞清楚!!
一定要搞清楚!!!
重要的事情说三遍!!!!!!!没经验的一定要找有经验的帮忙!!!
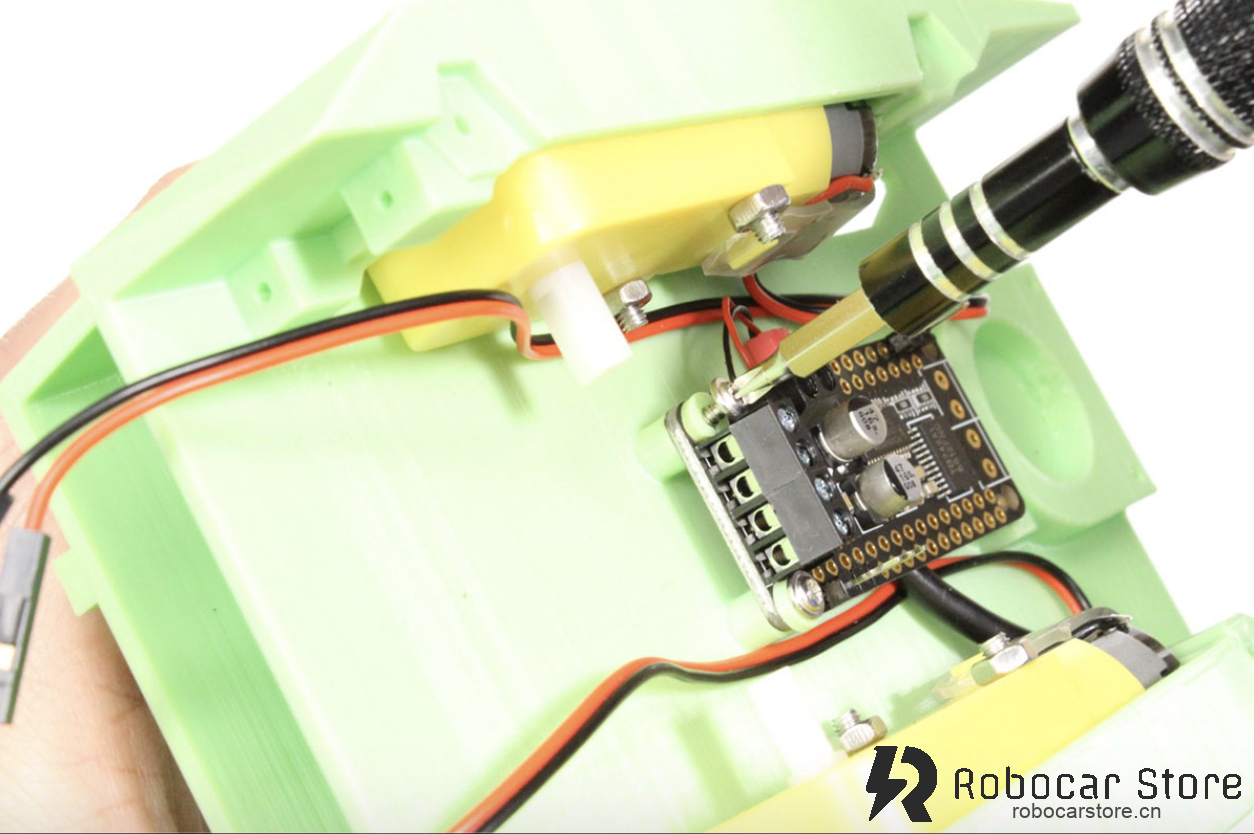
6,电机驱动模块电源接口连接MicroUSB数据线
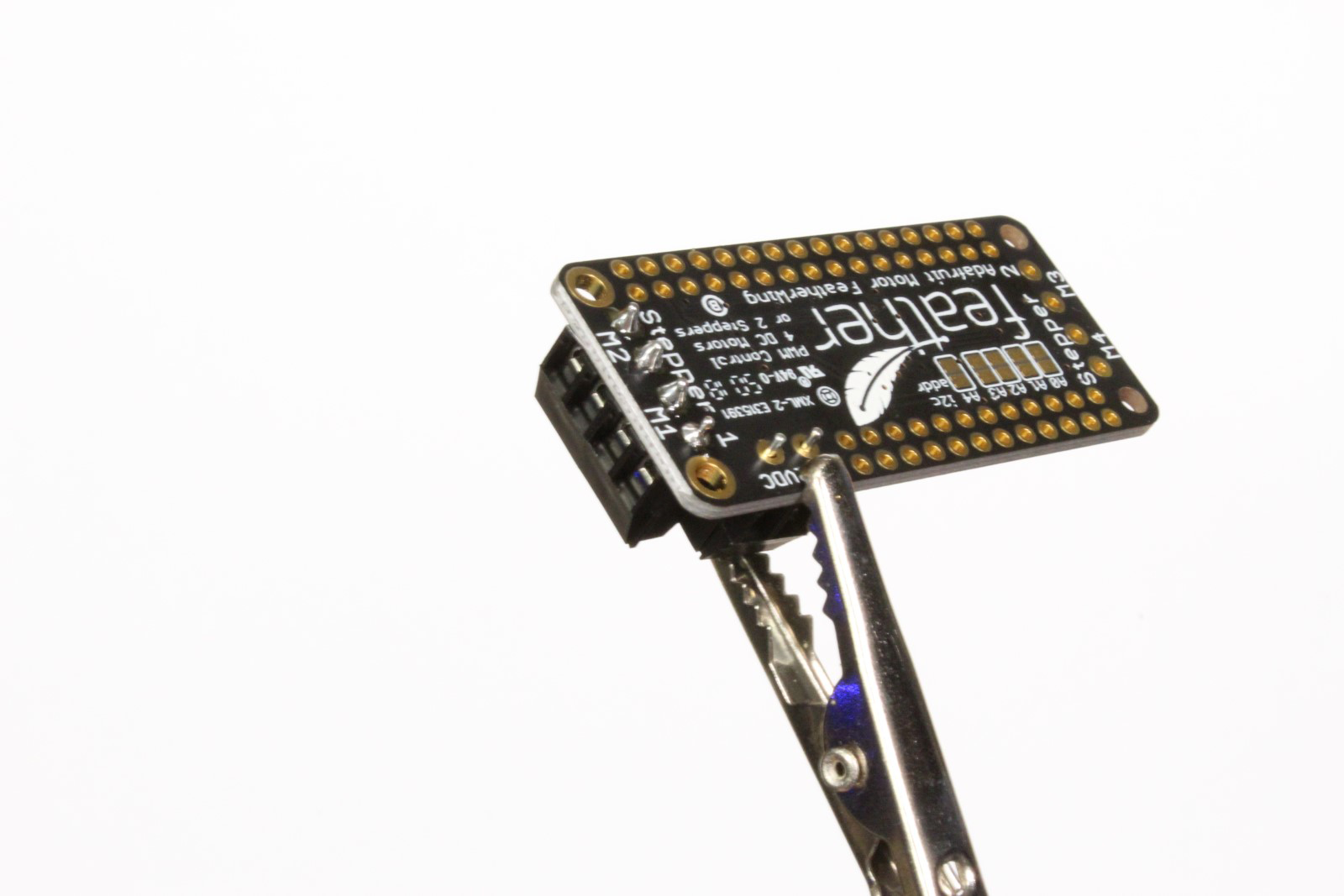
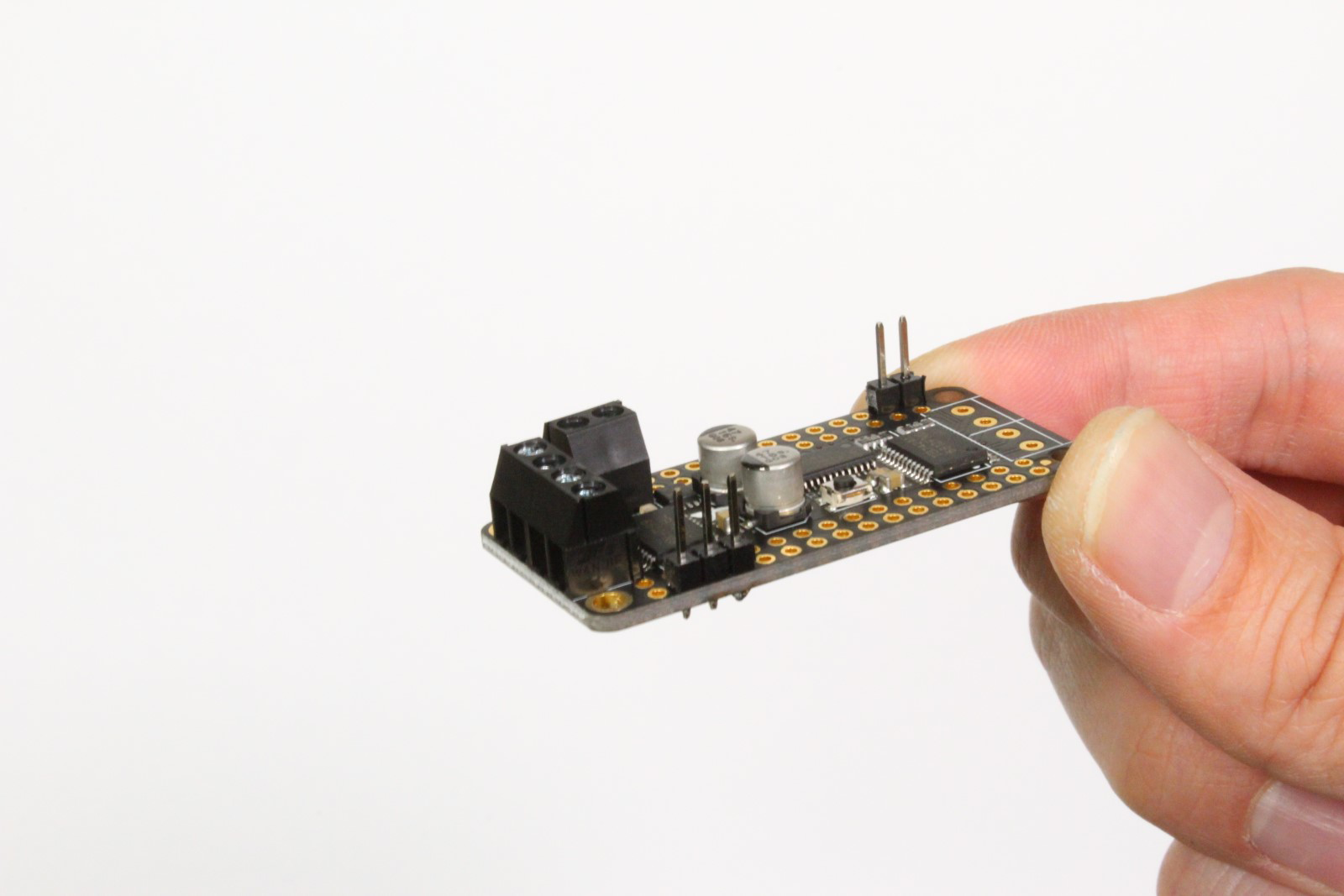
先看看这个电机驱动模块接口,其实它是PCA9685和TB6612的集成板。

然而,组装JetBot只需要用到几个接口而已。这一步骤只接MicroUSB数据线,作为外部电源线(3v3接正极、GND接负极)。如下图:

Step – 3 安装TT马达
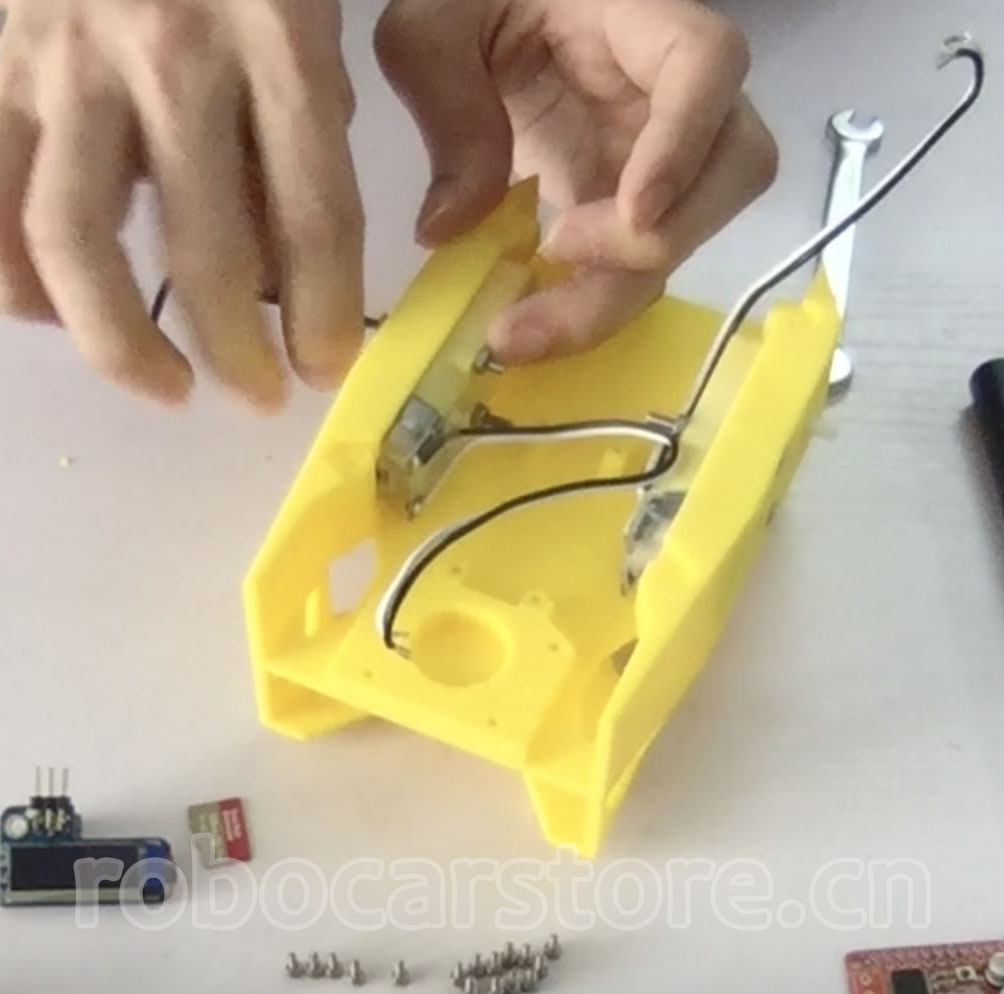
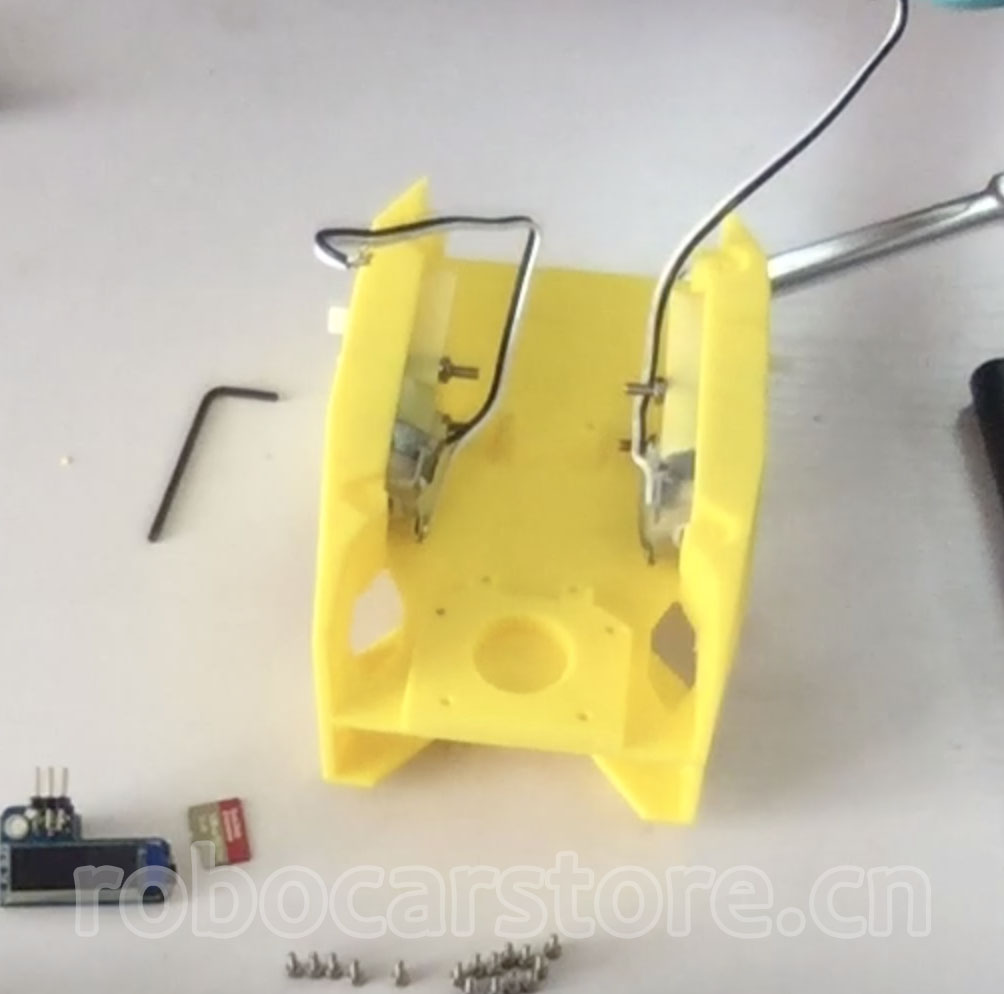
7,安装TT马达
准备好3D打印部件「车架」(chassis.stl)和TT马达。把TT马达安装在「车架」上,用M3螺丝和M3螺母固定,注意请轻手一点,3D打印的车架并不如想象中的坚固。
Step – 4 安装电机驱动模块
8,安装电机驱动模块在「车架」上
先把电机驱动模块用M2*6自攻丝安装在「车架」上(如图1)。

Step – 5 TT马达与电机驱动模块接线
9,TT马达与电机驱动模块接线
根据下图的接线方法进行TT马达与驱动模块的接线(即使接错也不打紧在之后的应用实例中可检测方向是否正确,再作调整)。
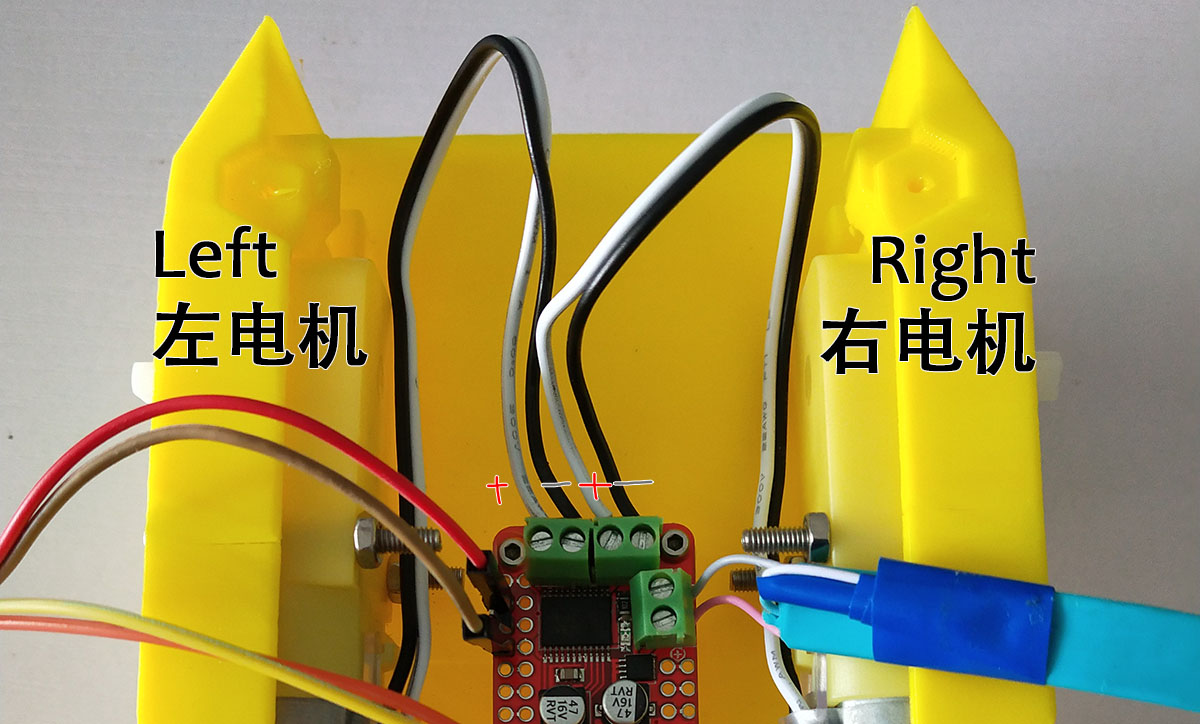
注意:在安装视频中,电机驱动安装方向与图片不一样,请按文章上图的所示方向一致即可。
Step – 6 安装轮子和预接杜邦线
10,安装万向轮
准备好「万向轮支架」(caster_shroud_60mm.stl)、「万向轮槽」(caster_base_60mm.stl)、聚甲醛小球(POM ball)。依次在车架的凹槽中放上「万向轮支架」–> 聚甲醛小球–> 「万向轮槽」,最后用「M2*8自攻螺丝」上紧固定。




11,电机驱动模块预留接线
先使用杜邦线预接电机驱动模块上的四个引脚,分别是:3.3v、GND、SDA、SCL。预接好,等待之后的方便使用。
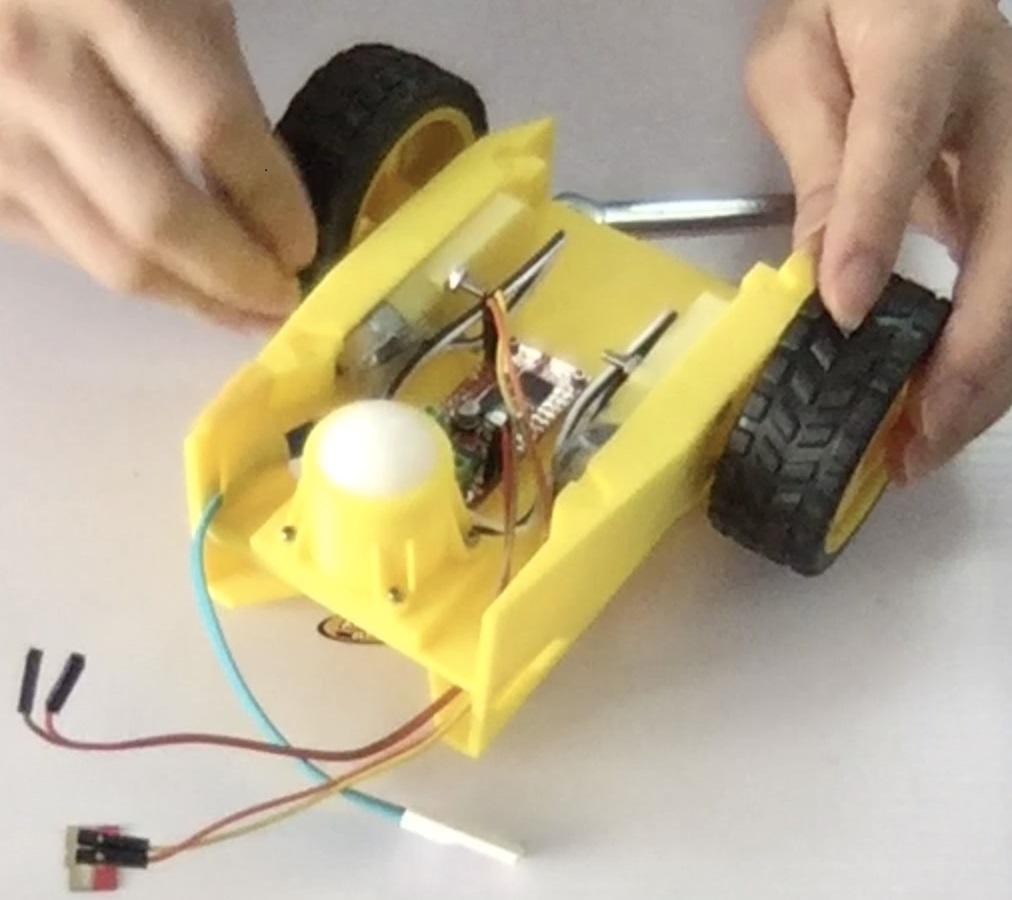
12,安装左右两边轮子
请小心翼翼地安装轮子,以免用力过度压烂「车架」。
Step – 7 Jetson Nano、OLED、电机驱动模块接线
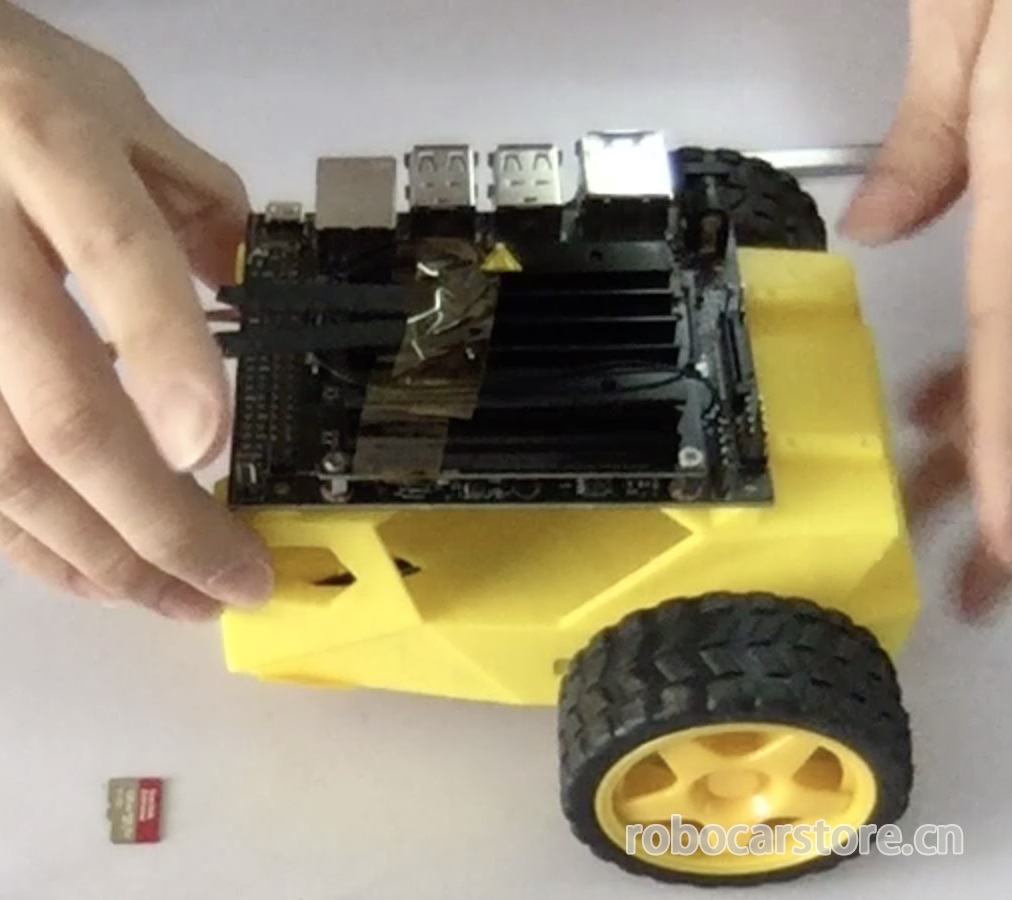
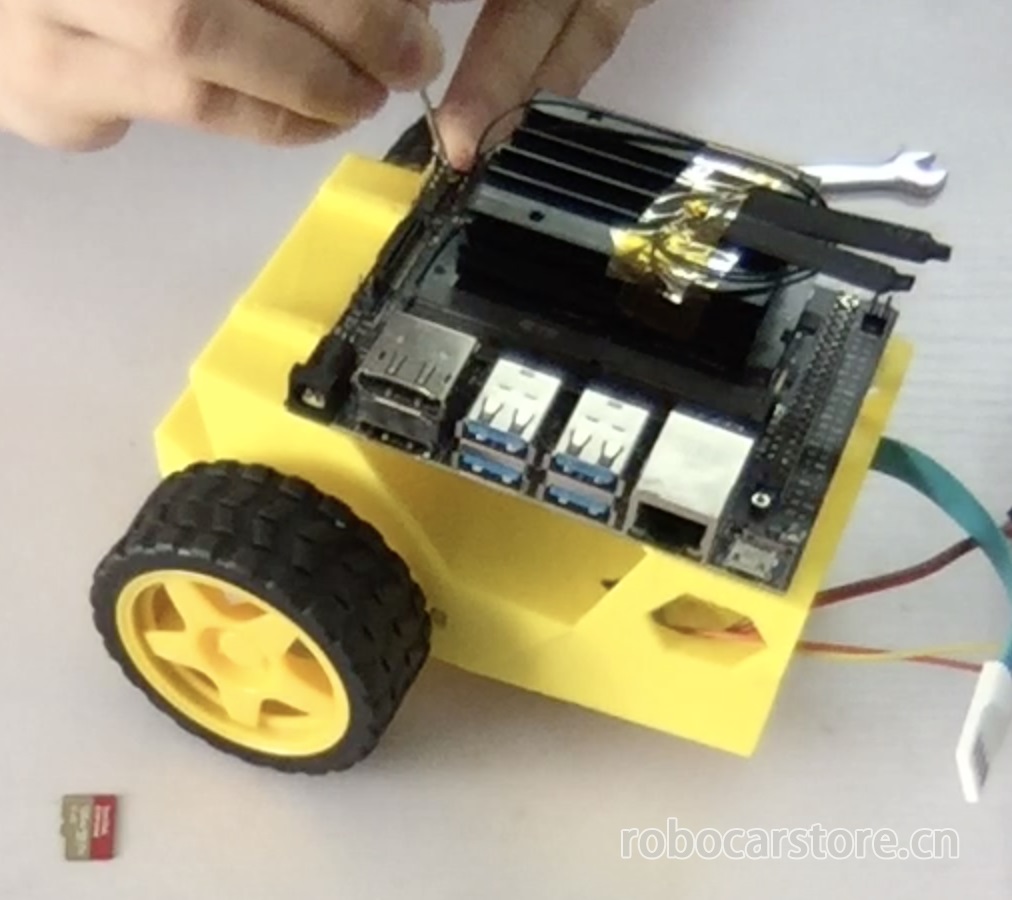
13,固定Jetson Nano在车架上
使用M2*6自攻丝把Jetson Nano固定在「车架」上。
14,OLED Display安装前焊接加工
在接线之前我们需要使用长双排弯针对OLED Display进行焊接加工(当然你也可以直接焊接杜邦线)。
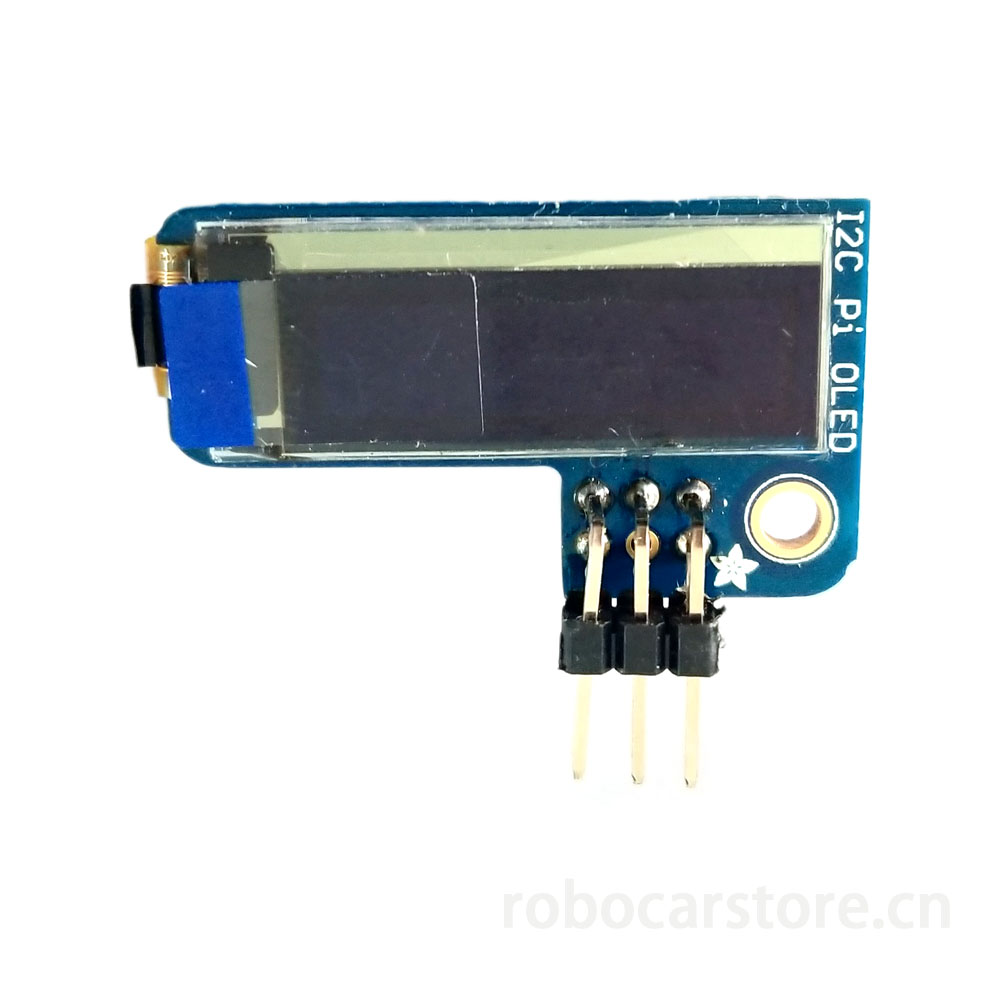

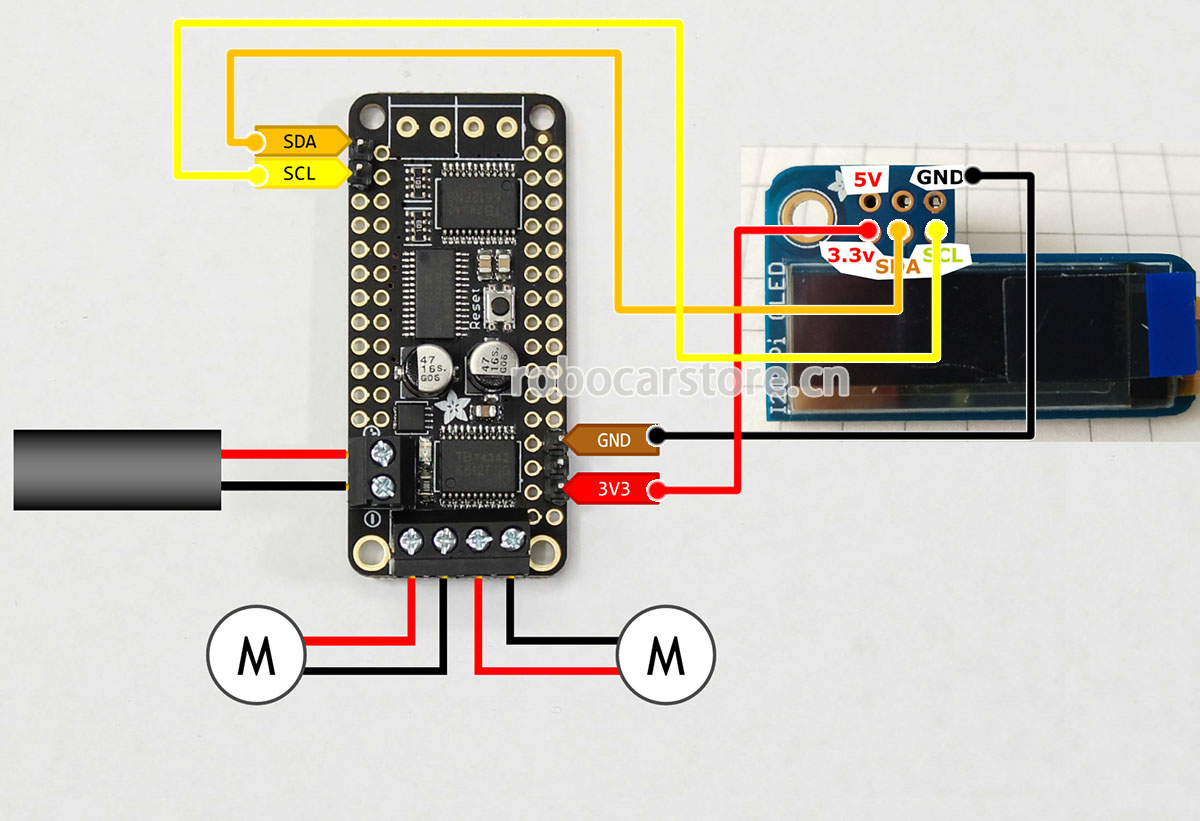
15,OLED Display与驱动电机接线
先来了解OLED Display的引脚。

然后参考下图连线所示,把OLED Display 和电机驱动模块进行接线。
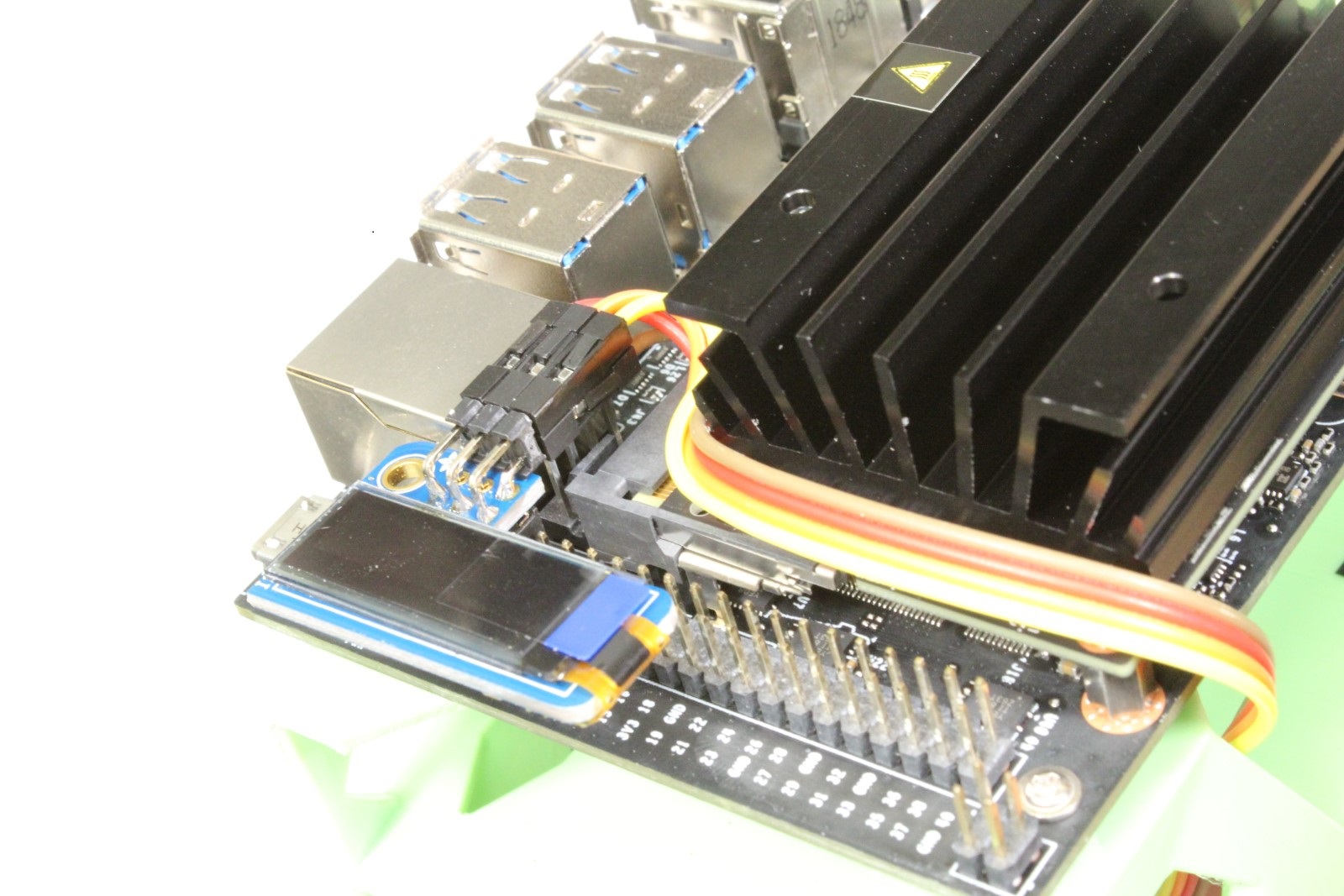
16,把OLED与Jetson Nano接线
把OLED安插在下图所示针脚上(与OLED Display的针脚是一一对应的),安装方向请参考图2。

Step – 8 安装Pi V2 摄像头
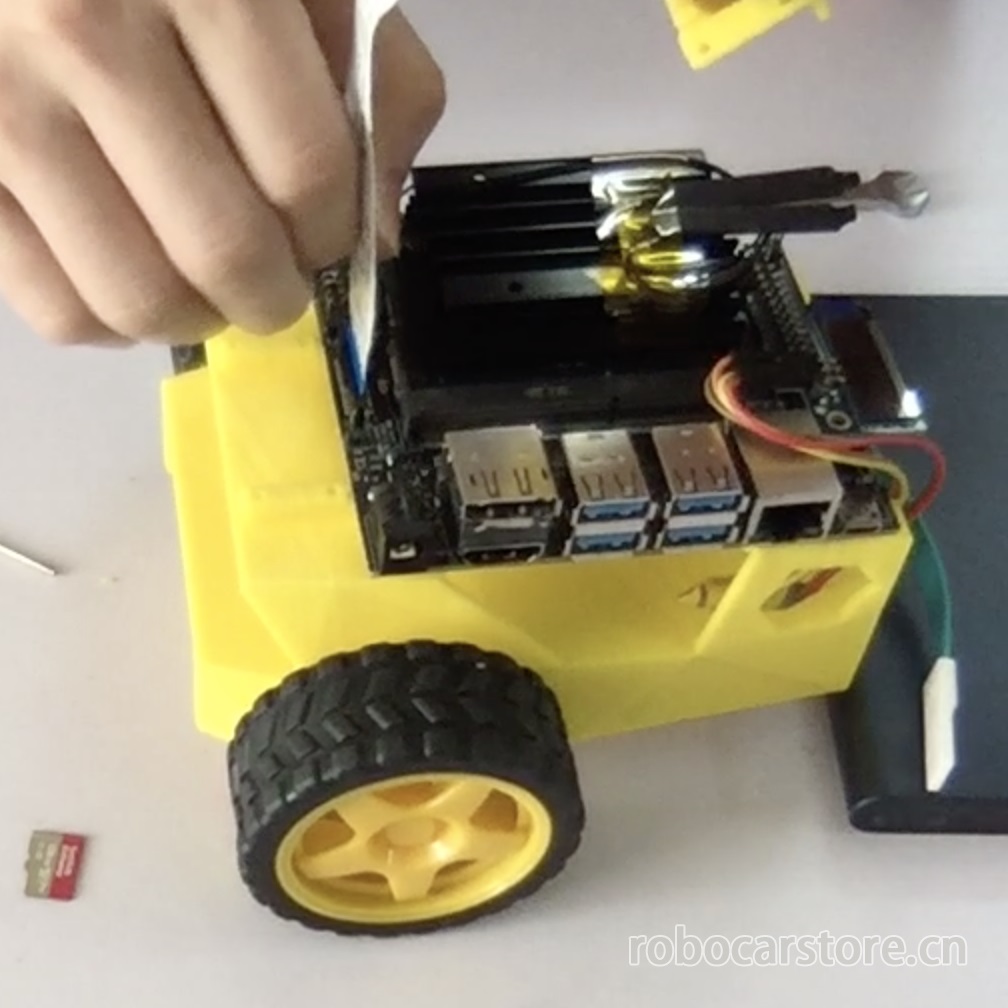
17 把摄像头固定在「车架」上
先使用M2*6自攻丝固定Pi V2摄像头在「摄像头支架」(camera_mount.stl)上,视频线接上Jetson Nano,再把「摄像头支架」使用M2*6自攻丝固定在「车架」上即可。


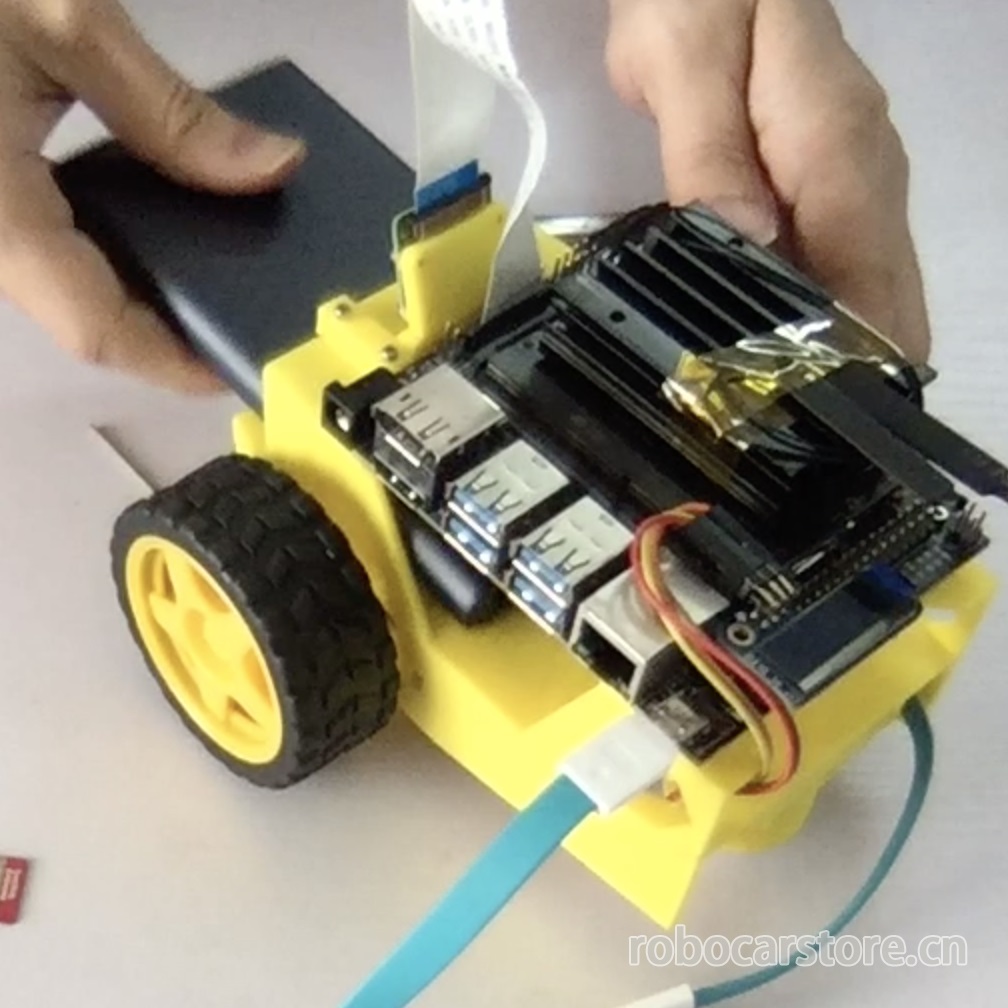
Step – 9 安装移动电源
18,把移动电源放进在车架的电源槽
这是最后一步,也是最简单的一步了。把移动电源放进电源槽里,用胶带或者3M的双面胶固定。
下一篇,将介绍怎么把Jetson Nano的系统烧写在MicroSD卡上。
to be continue……