
现在官方已经没有提供懒人版的Donkey Car 了,所以这次就分享一下,小编在树莓派(Raspberry Pi 3 B+)安装Donkey Car 的过程。
本文参考: http://docs.donkeycar.com/guide/robot_sbc/setup_raspberry_pi/
环境
官方推荐使用Raspian Lite(Stretch) (352MB)。但我使用的是带桌面的版本,如下
树莓派OS:
– Raspbian Buster with desktop
Version:July 2019
Release date:2019-07-10
Kernel version:4.19
下载地址:
https://www.raspberrypi.org/downloads/raspbian/
怎么刷写安装树莓派,联网,这里就不多说了。
假设你已经安装好树莓派系统,并且能联网,可以选择连接显示器,直接操作(本示例的操作模式),也可以远程SSH操作。你喜欢就好。
打开命令行,我们开始吧!
开始安装
1,在安装前更新你的系统
要更新你的系统,输入以下命令:
sudo apt-get update sudo apt-get upgrade
更新系统需要花费很大时间,而且可能需要重复多次才能更新完成。请耐心操作。
2,配置树莓派开启摄像头,I2C,扩展文件系统
要打开树莓派的配置对话框,在命令行输入:
sudo raspi-config
① 开启I2C
05 Interfacing Options -> P5 I2C ->「Yes」
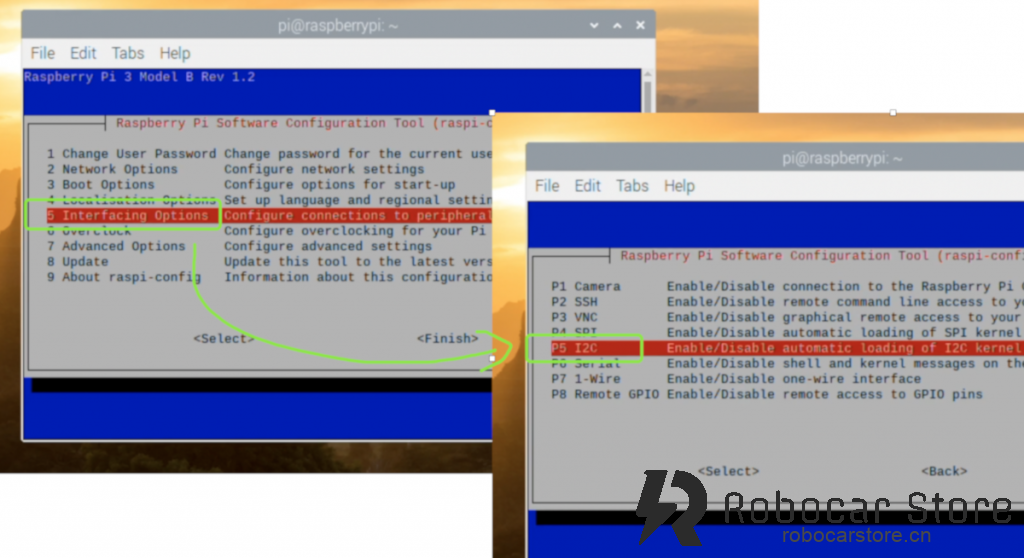
② 开启摄像头:
05 Interfacing Options -> P1 Camera -> 「Yes」

③ 扩展文件系统
7 Advanced Options -> A1 Exapand Filesystem
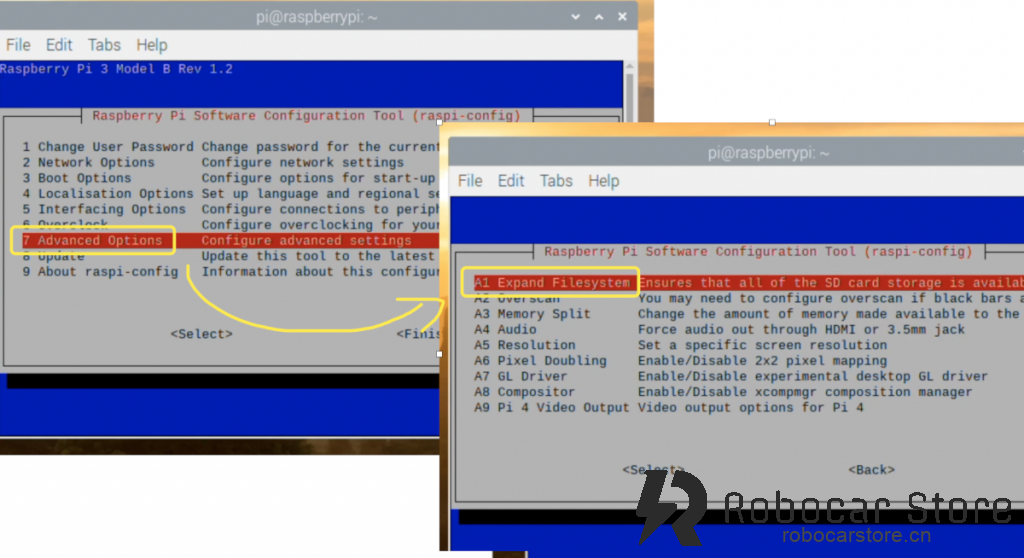
设置好,之后退出配置对话框,会提示是否现在重启,选择「Yes」重启系统。
3,安装Donkey Car 需要的依赖项
在命令行中输入以下命令:
sudo apt-get install -y build-essential python3 python3-dev python3-pip python3-virtualenv python3-numpy python3-picamera python3-pandas python3-rpi.gpio i2c-tools avahi-utils joystick libopenjp2-7-dev libtiff5-dev gfortran libatlas-base-dev libopenblas-dev libhdf5-serial-dev git
经过漫长的等待终将安装完成,如果爆错误,请重新运行一遍。
(如果还是解决不了问题,请在留言区分享你所遇到的问题,请贴出你的系统版本,尽可能多的信息,我们才有可能帮助到你。)
4,安装OpenCV的依赖项(可选)
这一步骤可选,如果你没有用到OpenCV的功能可以不安装。
但如果还是想安装的话,在命令行输入以下命令:
sudo apt-get install libilmbase-dev libopenexr-dev libgstreamer1.0-dev libjasper-dev libwebp-dev libatlas-base-dev libavcodec-dev libavformat-dev libswscale-dev libqtgui4 libqt4-test
5,安装虚拟环境
在命令行输入:
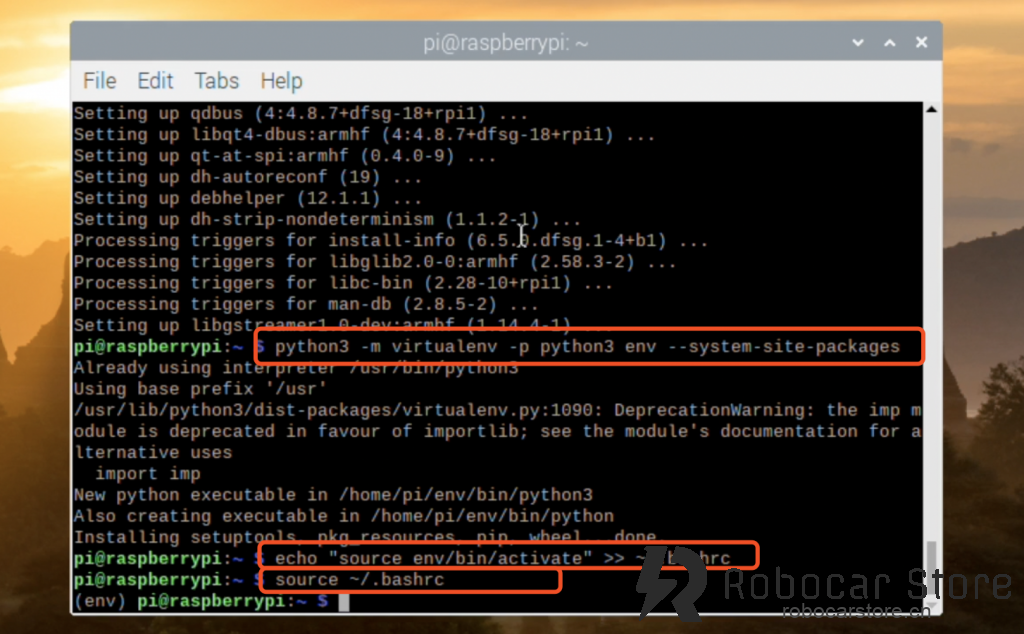
python3 -m virtualenv -p python3 env --system-site-packages echo "source env/bin/activate" >> ~/.bashrc source ~/.bashrc
运行完以上命令,命令行会多了个(env)前缀,表示我们在一个叫作env的虚拟环境下,进行操作。如下图:
虚拟环境的作用是,避免树莓派运行多个项目的时候,不会因为更新了某个依赖项或者自动清除了某个依赖项,在其他项目中出现了不可预测的错误。
现在,每次开机都会自动进入env的虚拟环境,如果想退出,命令行输入:deactivate ,即可。
6,安装Donkey Car 的 Python 代码
创建目录,并进入该目录
在用户目录下,新建一个名为projects 的文件夹(目录),并进入该文件夹,输入命令如下:
mkdir projects cd projects
注意:直接进入用户目录,只需要在命令行输入: cd ,回车即可。
从GitHub上克隆整个Donkey car项目
输入以下命令:
git clone https://github.com/autorope/donkeycar
接着,又开始漫长的等待,因为github在国内的速度不是一般的快,请耐心等待,如果一次不行,则再运行一次。
提示:如果对命令行指令比较熟悉的,可使用scp指令,通过一些软件项目打包下载后上传到树莓派的当前目录。具体用法请自行搜索。
当git clone(克隆) 完成,我们使用使用以下命令操作:
# 进入donkeycar项目目录 cd donkeycar # 切换master分支进行开发 git checkout master # 自动安装树莓派python的依赖项 pip install -e .[pi] # 安装tensorflow 版本为1.13.1 pip install tensorflow==1.13.1
提示:
– 当运行 pip install -e .[pi] 安装,出现错误时,可尝试再执行一次。
– 当运行 pip install tensorflow==1.13.1 ,可能会提示下载的文件的检验哈希码不正确,导致没有办法下载,可根据错误提示的下载地址,手动使用 wget 命令下载,下载完成后,使用 pip install 「下载的文件名称」,进行安装。
验证Tensorflow安装是否成功
命令行输入python进入Python的交互编程模式:
输入以下代码检查:
import tensorflow print(tensorflow.__version__)
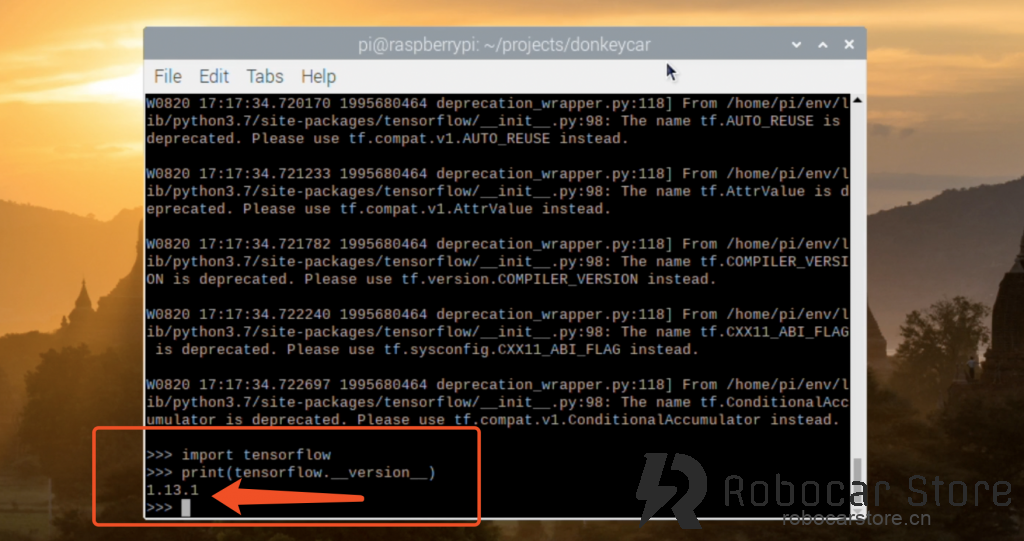
当看到1.13.1的版本好,证明你已经安装Tensorflow成功
注意:python第一次加载tensorflow会有一些提示,请不用担心,这不是错误提示。
7,安装Python的OpenCV(可选)
安装OpenCV
这个也是非必须安装的,如果你没有用到OpenCV的功能。
但如果你还是想安装,请输入以下命令:
pip install opencv-python
验证是否安装OpenCV成功
同样进入python的交互编程模式,输入以下代码:
import cv2 print(cv2.__version__)