玩转JetBot自动驾驶 (六)训练JetBot自己认识危险¶
在训练之前,建议你把JetBot关机,使用一个5V,3A的充电头或专用电源给JetBot供电。不建议使用移动电源,因为在训练的过程中会消耗很多资源很费电,如果嫌麻烦的请把移动电源充满电,以免在训练在训练过程中没电了,白费劲了。
开机,通过浏览器输入如下网址:
http://<你JetBot的IP地址>:8888
会看到Jupyter Lab的界面提示登陆:
默认的账户密码都是:jetbot
在Jupyter Lab的文件浏览器中,找到collision_avoidance文件夹,点开train_model.ipynb开始训练吧。
避障 – 训练模型¶
训练的方法很简单,我们将使用图像分类器来训练两个类free和blocked,我们用这个训练完的模型来避免碰撞。为此,我们将使用一个流行的深度学习库 PyTorch。
import torch.optim as optim
import torch.nn.functional as F
import torchvision.datasets as datasets
import torchvision.models as models
import torchvision.transforms as transforms
上传并提取数据集¶
上次,我们上一次收集并打包成.zip的数据集,然后通过调用shell (命令行)命令来提取(解压缩)此数据集。如果你直接就在jetson nano上训练,可以跳过这一步。
你应该见到一个名为dataset的文件夹出现在文件浏览器上。
创建数据集实例¶
现在我们使用torchvision.datasets 库中的ImageFolder数据集类。里面有个附加torchvision.transforms库用于转换数据,为训练模型做好准备。
dataset = datasets.ImageFolder(
transforms.ColorJitter(0.1, 0.1, 0.1, 0.1),
transforms.Resize((224, 224)),
transforms.Normalize(\[0.485, 0.456, 0.406\], \[0.229, 0.224, 0.225\])
将数据集拆分为训练集和测试集¶
接下来,我们将数据集拆分为 训练集 和 测试集。测试集将用于验证我们训练完的模型准确性。
train\_dataset, test\_dataset = torch.utils.data.random\_split(dataset, \[len(dataset) - 50, 50\])
创建数据加载器以批量加载数据¶
我们将创建两个DataLoader实例,它们为洗牌数据提供实用程序,生成_批次_图像,并与多个任务并行加载样本。
train\_loader = torch.utils.data.DataLoader(
test\_loader = torch.utils.data.DataLoader(
定义神经网络¶
现在,我们定义我们将要训练的神经网络。 torchvision 库提供了一系列我们可以使用的预训练模型。
在一个称为_迁移学习_的过程中,我们可以重新利用预先训练的模型(在数百万图像上进行训练),以获得可能少的数据,准确完成尽量多的任务。
在预训练模型的原始训练中学到的重要特征可重复用于新任务。 我们将使用alexnet模型。
model = models.alexnet(pretrained=True)
alexnet模型最初是针对具有1000个类标签的数据集进行训练的,但我们的数据集只有两个类标签! 我们将把最好的层替换为最新的,未经训练的层只有两个输出。
model.classifier\[6\] = torch.nn.Linear(model.classifier\[6\].in\_features, 2)
最后,我们将模型转移到GPU上执行
device = torch.device('cuda')
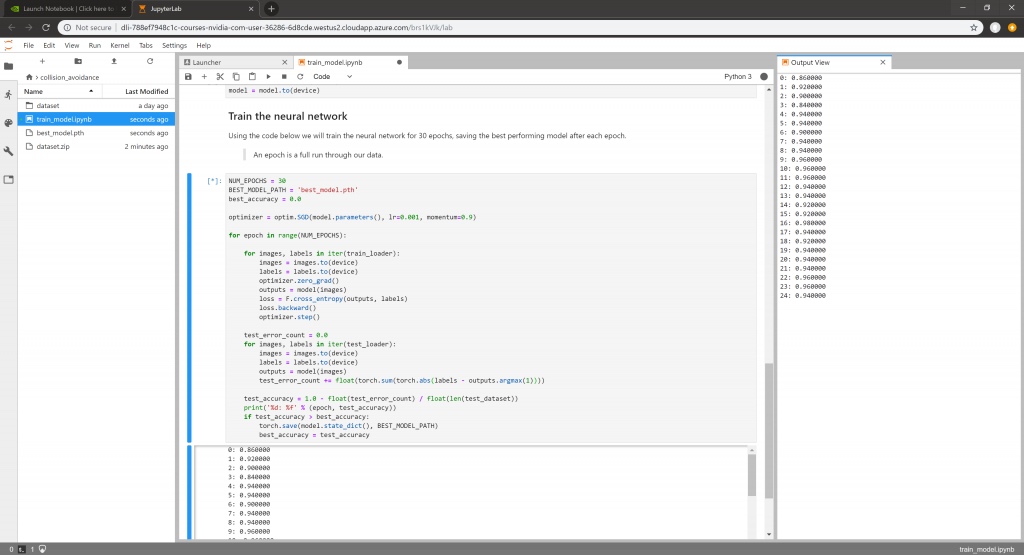
训练神经网络¶
使用下面的代码,将开始训练我们的神经网络,在运行完每个世代后,保存表现最佳的模型。
一个世代是所有数据运行一遍
BEST\_MODEL\_PATH = 'best\_model.pth' optimizer = optim.SGD(model.parameters(), lr=0.001, momentum=0.9) for epoch in range(NUM\_EPOCHS): for images, labels in iter(train\_loader): images = images.to(device) labels = labels.to(device) loss = F.cross\_entropy(outputs, labels) for images, labels in iter(test\_loader): images = images.to(device) labels = labels.to(device) test\_error\_count += float(torch.sum(torch.abs(labels - outputs.argmax(1)))) test\_accuracy = 1.0 - float(test\_error\_count) / float(len(test\_dataset)) print('%d: %f' % (epoch, test\_accuracy)) if test\_accuracy \> best\_accuracy: torch.save(model.state\_dict(), BEST\_MODEL\_PATH) best\_accuracy = test\_accuracy
当这完成后,你应该会见到一个文件best_model.pth在Jupyter Lab的文件浏览器上,鼠标右键可以选择下载,可以保存这个模型在你的系统平台上。
可以说,这就是JetBot自己学习的知识了。在下一篇,我们将使用这个知识,让JetBot独自运行,并且能避开障碍。